")
")
")
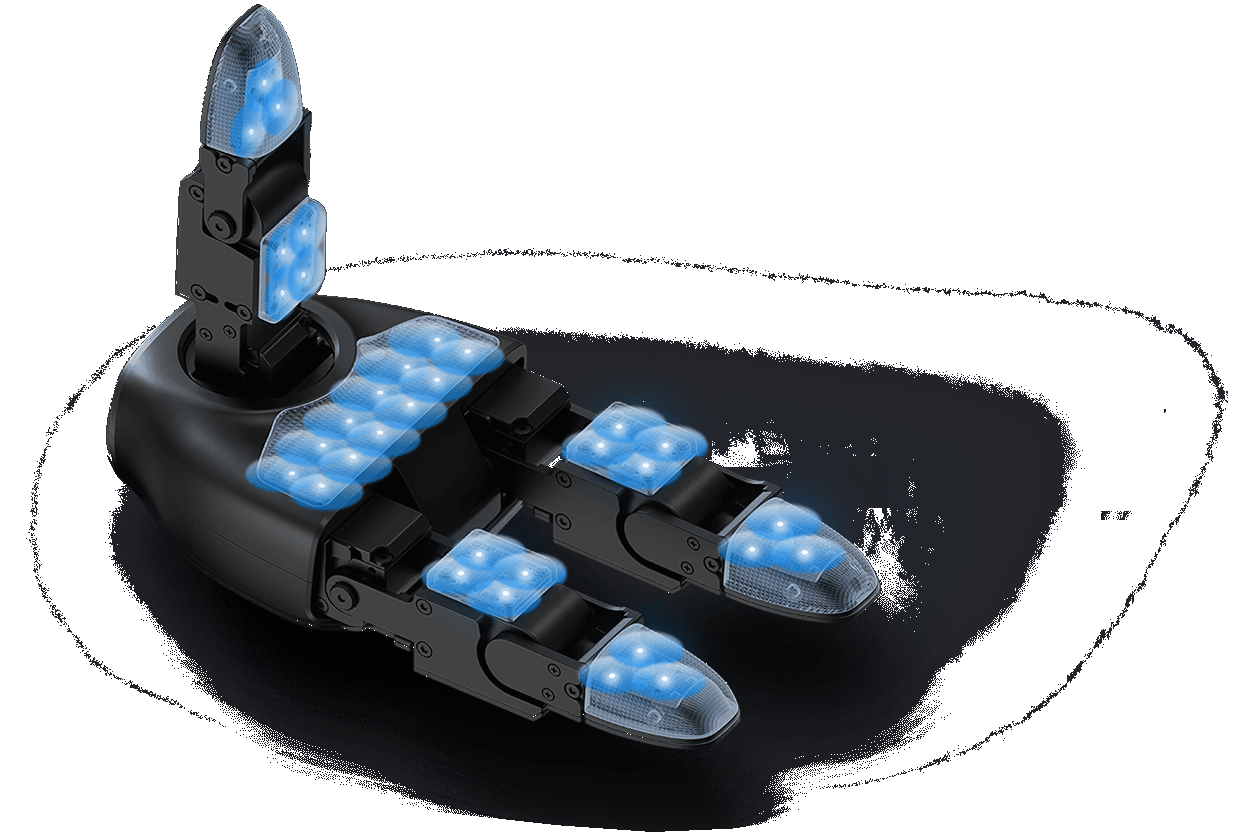
Unitree Dex3-1

Unitree Dex3-1 Hand
Combined with force and position hybrid control, it is sensitive and reliable,
and can simulate the precise operation of the object
Dex3-1
Dex3-1 three-finger dexterous hand, with 7 degrees of freedom 7 motion off machine: 6 micro brushless force control joint direct drive, 1 micro brushless force control joint gear drive, one hand with 33 tactile sensors. It can be used with G1 humanoid robot to perform various complex actions.
Product Parameters

| Model | Dex3-1 |
||
|
Body Parameters
|
Weight |
710g |
|
|
Size |
175mm x 88mm x 77mm |
||
|
Degrees of Freedom |
Thumb x 3 Index Finger x 2 Middle Finger x 2 |
||
|
Transmission Mechanism |
6 Motors Drive Directly 1 Motor Drive with Gears |
||
|
Angle of Joint |
Thumb Joint 0: -60°~60° Thumb Joint 1: -35°~60° The Thumb Joint 2: 0 to 100° Index Finger Joint 0: 0 °~90° Index Finger Joint 1: 0 °~100° Middle Finger Joint 0: 0 °~90° Middle Finger Joint 1: 0 °~100° |
||
|
Fingertip Repeat Positioning Accuracy |
±2mm |
||
|
Working Voltage |
12~58V |
||
|
Static Current |
58V @ 0.2A |
||
|
Maximum Current |
10A |
||
|
Communication Interface |
USB2.0 |
||
|
Working Temperature Range |
-20℃ ~ 60℃ |
||
|
Load Conditions ( Palm Facing Down At Room Temperature, Grasping A 5cm Round Hard Object) |
The Maximum Weight is 500g |
The Maximum Power Is: 400W@3s |
|
|
Load Condition (Palm Facing Left At Room Temperature, Grasping A 5cm Round Hard Object) |
The Maximum Weight is 500g |
The Maximum Power Is: 400W@3s |
|
|
Sensing parameters
|
Number of Pressure Sensors |
9 (Total of 33 Pressure Sensors) |
|
|
Array resolution |
2 x 2 (Palm) x 3 2 x 2 (Single Finger Pad) x 3 3 x 1 (Single Fingertip) x 3 |
||
|
Range of Perception |
10g-2500g |
||
|
Maximum Acceptance (Unamaged) |
20kg |
||
|
Software functions
|
Communication rate |
1000Hz |
|
|
The number of bytes in a full packet |
Sender:1234 bytes Receiver:1270 bytes |
||
|
Perceptual feedback |
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current, Sensor Pressure Value, Sensor Temperature Value, imu Data |
||
|
Control feedback |
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient |
||
|
Miniature Brushless Force Control Joint Parameters
|
Model |
F-1515-108 Miniature Brushless Force Control Joint |
F-1515-214 Miniature Brushless Force Control joint |
|
Weight |
45g |
||
|
Size |
34.8mm x 23.1mm x 23.3mm |
||
|
Reduction Ratio |
1:108 |
1:214 |
|
|
Maximum Torque (Ideal) |
0.76Nm |
1.498Nm |
|
|
Maximum Torque (Actual) |
The Torque Is In The Same Direction As The Speed:0.49Nm |
The Torque Is In The Same Direction As The Speed:0.86Nm |
|
|
The Toque Is In The Opposite Direction of The Rotational Speed:1.37Nm |
The Toque Is In The Opposite Direction of The Rotational Speed:3.1 Nm |
||
|
Maximum Rotational Speed |
23rad/s |
11rad/s |
|
|
Maximum Line Current |
4.76A |
||
|
Communication Control Frequency |
1000Hz |
||
|
Method of Communication |
High Speed Unibus |
||
|
Encoder |
Rotor Absolute Value Encoder |
||
|
Working Temperature Range |
-20℃ ~ 60℃ |
||
|
IP Rating |
/ |
||
|
Working Voltage |
12-24V |
||
|
Motor Preceived Feedback |
Torque, Angle, Angular Velocity, Temperature |
||
|
Motor Control Instruction |
Torque, Angle, Angular Velocity, Stiffness, Damping |
||
[1] It is the size of the dexterous hand in flat state.
[2] The data refers to the pressure exerted by the dexterous hand when it is pressed by a vertical downward cylinder with a diameter of 1cm, which varies in different application scenarios. Please refer to the actual situation.
[3] This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
[4] Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.




