")
")
")
Unitree Dex5-1
Unitree Dex5-1 Hand
Smart Adaptability, Instant Responsiveness
20 Degrees of freedom (16 active+4)
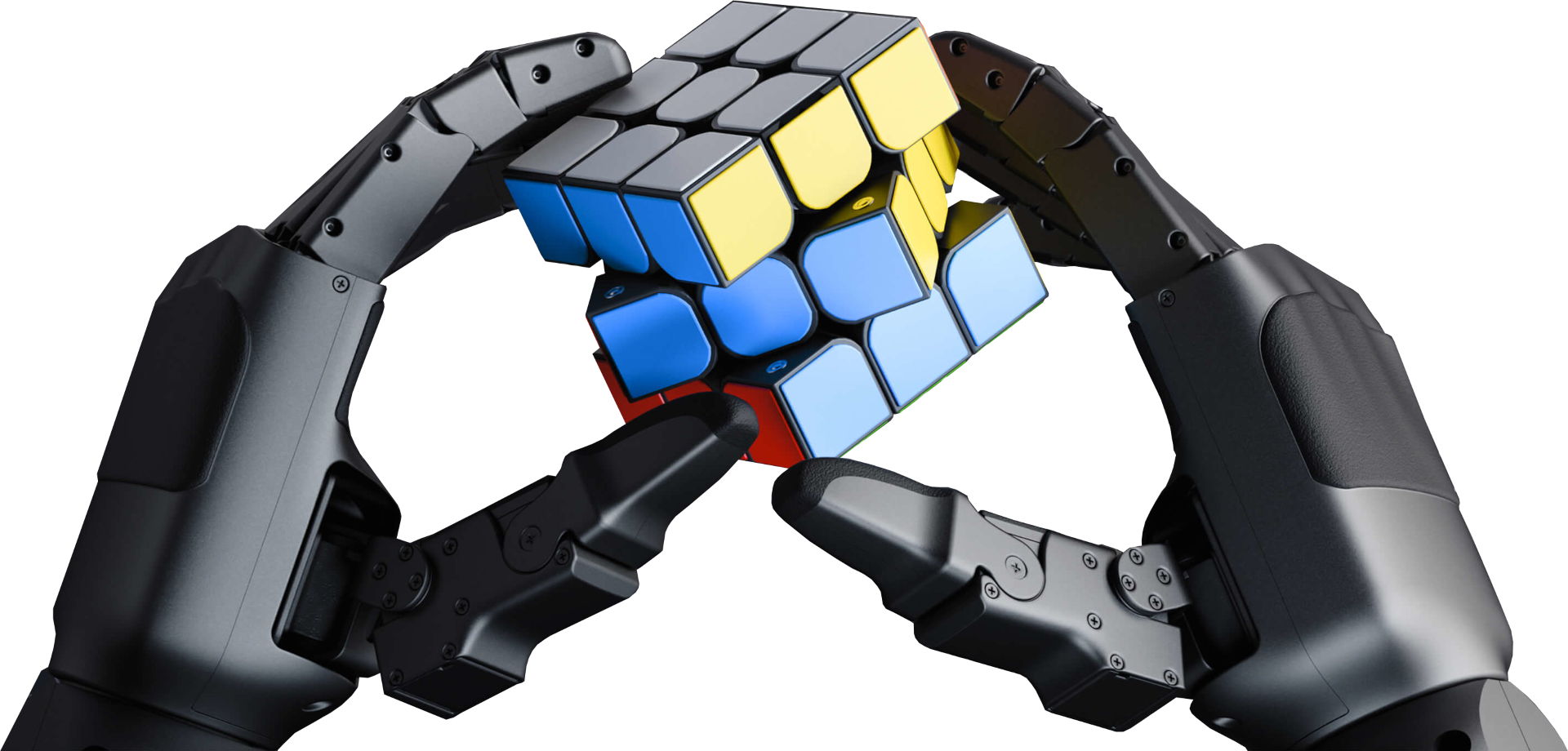
High Precision, Ultimate Control
Each finger joint has degrees of freedom to support smooth backdrivability.
Eliminates "stiff hands", making operations smoother and more convenient for reinforcement learning(RL) training.
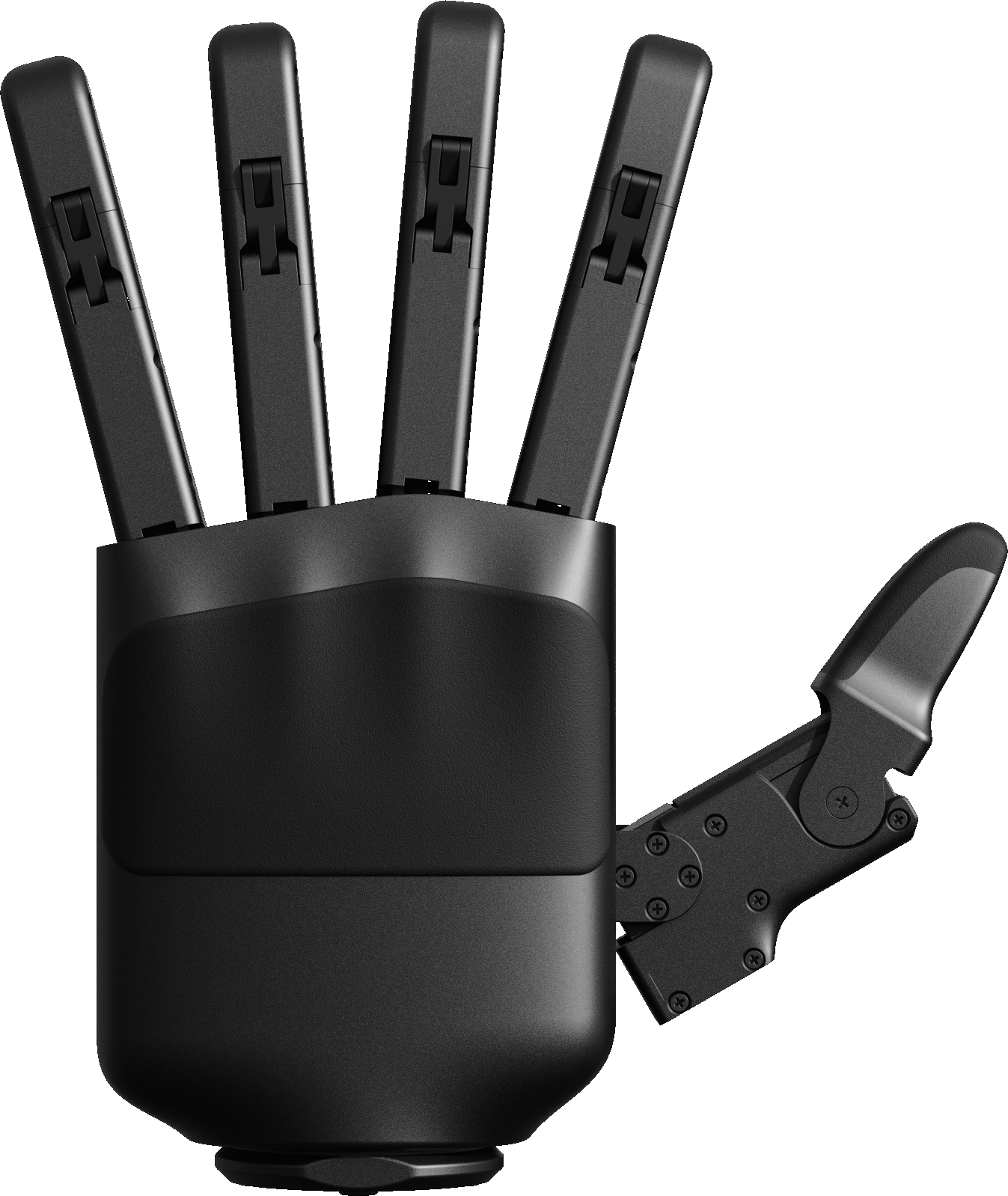
Ultra-fast Reflexes, Snake-like Flexibility
±22°
Four-finger Lateral Swing
Improved grip reliability and adapts more effectively to curved surfaces of grasped objects.
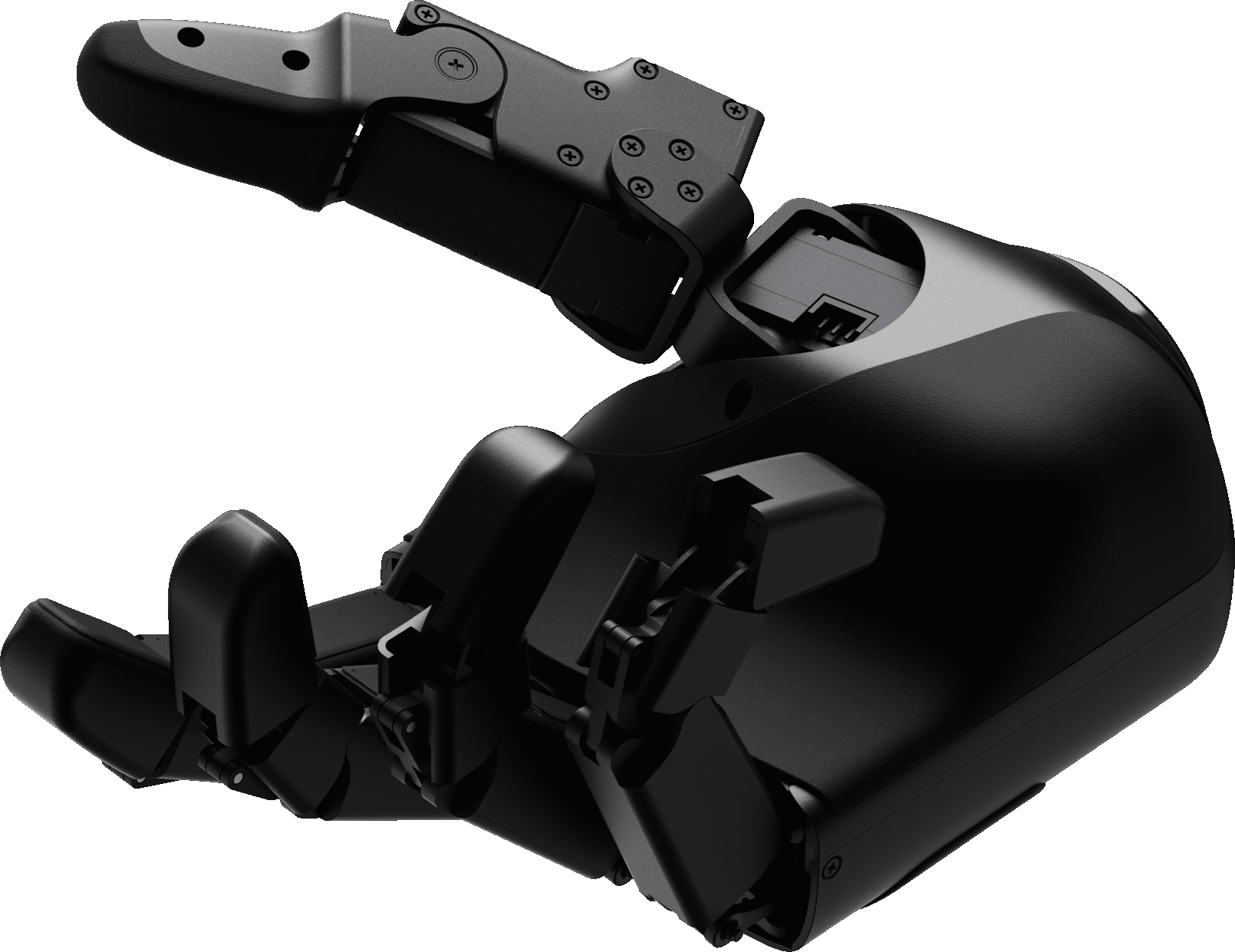
Precise Feedback, Control Every Millimeter
94 tactile sensors per hand;
supports secondary development of tactile algorithms for dexterous hands
High-power density hollow-cup motor
High-power density drive and high-precision encoder
Low damping small clearance reducer

Micro-gap design ensures smooth and effortless motion
The rotation axis of joint is closer to the surface, with ultra-small joint gaps.
This enables a smoother and more fluid grasp, preventing joint corners from getting stuck on objects.

Product Parameters
| Model | Dex5-1 | Dex5-1P | |
|
Body Parameters
|
Weight |
1100g |
1100g |
|
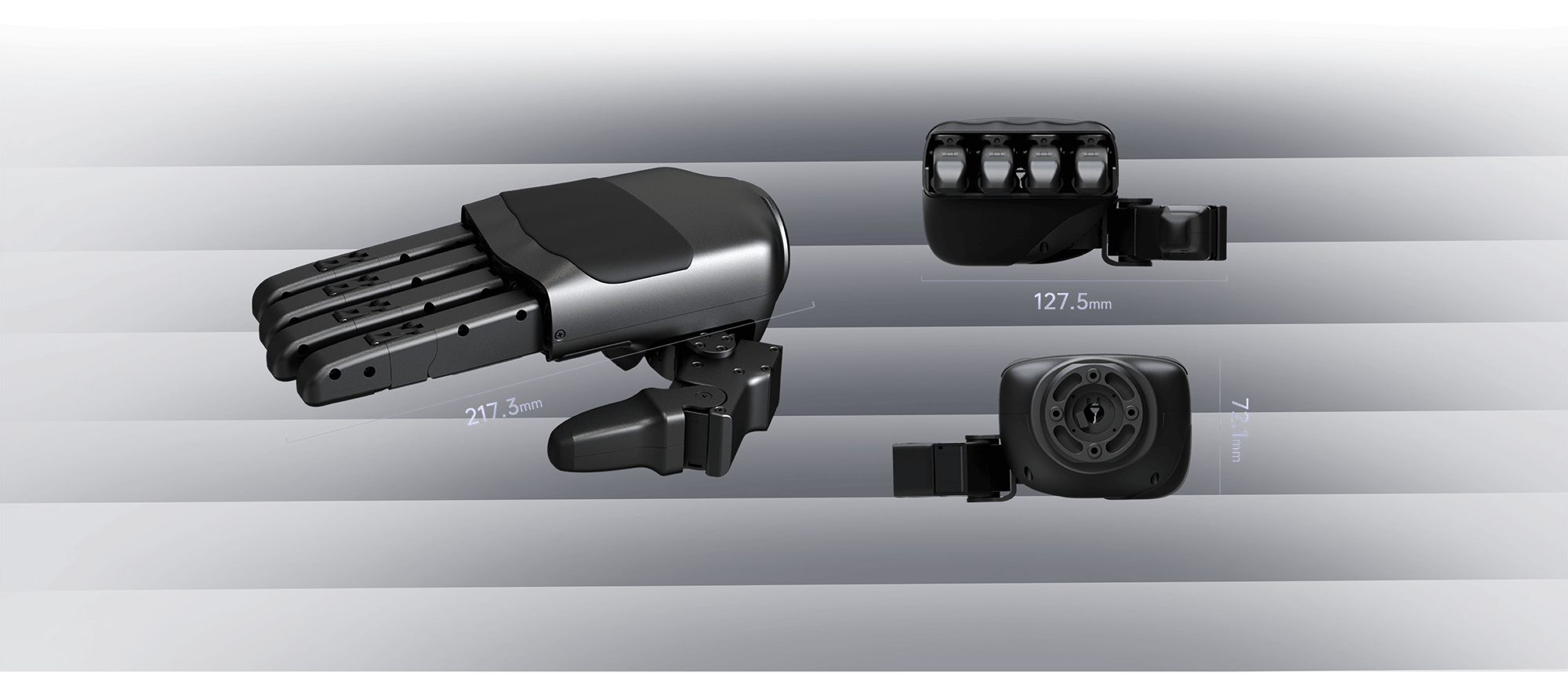
Size |
217.3mm x 127.5mm x 72.1mm (The final shipped version may vary.) |
217.3mm x 127.5mm x 72.1mm (The final shipped version may vary.) |
|
|
Degrees of Freedom |
Thumb x 4 Index Finger x 3 Middle Finger x 3 Ring Finger x 3 Little Finger x 3 |
Thumb x 4 Index Finger x 3 Middle Finger x 3 Ring Finger x 3 Little Finger x 3 |
|
|
Transmission Mechanism |
12 self-developed micro force-controlled composite transmission joints (enables robot to achieve tactile proprioception) 4 micro force-controlled joint gear transmission |
12 self-developed micro force-controlled composite transmission joints (enables robot to achieve tactile proprioception) 4 micro force-controlled joint gear transmission |
|
|
Angle of Joint |
Thumb Joint: Thumb Joint 0: -33.5°~39° Thumb Joint 1: 0°~100° Thumb Joint 2: 0°~110° Thumb Joint 3: 0°~92° Four-Finger Joints: Knuckles 0: -22°~22° Knuckles 1: 0°~90° Knuckles 2: 0°~95° Knuckles 3: 0°~81°(Coupling with finger joint 2) |
Thumb Joint: Thumb Joint 0: -33.5°~39° Thumb Joint 1: 0°~100° Thumb Joint 2: 0°~110° Thumb Joint 3: 0°~92° Four-Finger Joints: Knuckles 0: -22°~22° Knuckles 1: 0°~90° Knuckles 2: 0°~95° Knuckles 3: 0°~81°(Coupling with finger joint 2) |
|
|
Four-Finger Lateral Swing |
±22° |
±22° |
|
|
Minimum grip diameter |
10mm |
10mm |
|
|
Fingertip Repeat Positioning Accuracy |
±1mm |
±1mm |
|
|
Fingertip strength |
10N |
10N |
|
|
Working Voltage |
24V~60V |
24V~60V |
|
|
Static Current |
58V@ 0.2A |
58V@ 0.2A |
|
|
Maximum Current |
58V@4A |
58V@4A |
|
|
Communication Interface |
USB2.0 |
USB2.0 |
|
|
Working Temperature Range |
-20℃ ~ 60℃ |
-20℃ ~ 60℃ |
|
|
Load Conditions ( Palm Facing Down At Room Temperature, Grasping A 5cm Round Hard Object) |
The Maximum Weight is 3.5kg |
The Maximum Weight is 3.5kg |
|
|
Load Condition (Palm Facing Left At Room Temperature, Grasping A 5cm Round Hard Object) |
The Maximum Weight is 4.5kg |
The Maximum Weight is 4.5kg |
|
|
Sensing parameters
|
Number of Pressure Sensors |
/ |
12 (94 pressure sensors in total) |
|
Array resolution |
/ |
2 x 5 (Palm) 2 x 3 (Single Finger Pad) x 5 2 x 3 (Single Fingertip) x 5 2 x 3 (Single Finger Root) x 4 |
|
|
Range of Perception |
/ |
10g-2500g |
|
|
Maximum Acceptance (Unamaged) |
/ |
20kg |
|
| Software functions |
Communication rate |
1000Hz |
1000Hz |
|
The number of bytes in a full packet |
Sender:1234 bytes Receiver:1270 bytes |
Sender:1234 bytes Receiver:1270 bytes |
|
|
Perceptual feedback |
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current, imu Data |
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current, Sensor Pressure Value, Sensor Temperature Value, imu Data |
|
|
Control feedback |
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient |
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient |
[1] It is the size of the dexterous hand in flat state.
[2] The data refers to the pressure exerted by the dexterous hand when it is pressed by a vertical downward cylinder with a diameter of 1cm, which varies in different application scenarios. Please refer to the actual situation.
[3] The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[4] The product appearance is subject to change. Please refer to the final product.
[5] This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
[6] Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.




