")
")
")
Unitree Dex1-1
Unitree Dex1-1 Hand
designed specifically for embodied AI applications
Extra-large stroke, powerful force, and ultimate control
Product Parameters
| Model | Dex1-1 | |
|
Gripper Parameters
|
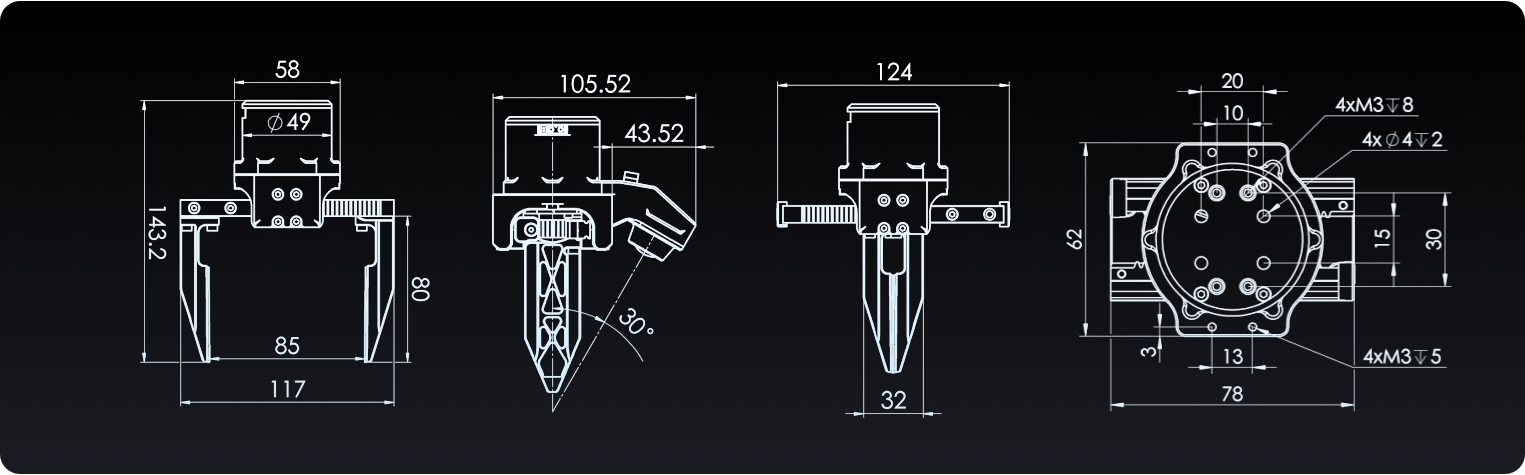
Dimensions |
143mm x 78mm x 67mm [1] |
|
Weight |
550g |
|
|
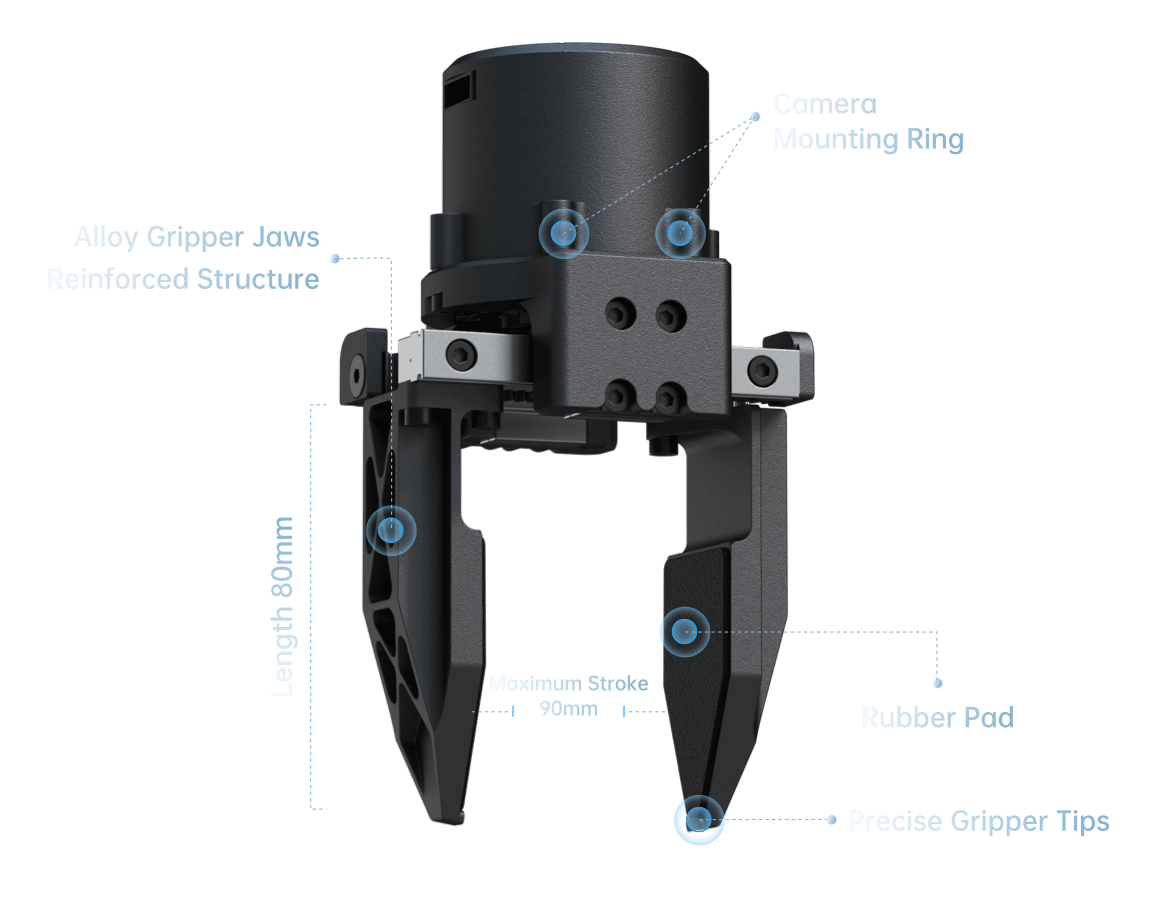
Stroke |
90mm |
|
|
Gripping Force (Adjustable) |
5~120N [2] |
|
|
Speed (Adjustable) |
50~375 mm/s [2] |
|
|
Position Resolution (Fingertip) |
0.1mm |
|
|
Grasp Load (Form-fitting) |
20kg [3] |
|
|
Grasp Load (Friction) |
5kg [4] |
|
|
Full-stroke Shortest Closing Time |
0.24s [2] |
|
|
Jaw Length |
80mm |
|
|
Motor Parameters
|
Communication Protocol |
High-speed 485 |
|
Communication Baud Rate |
6Mbps |
|
|
Communication Control Frequency |
1000Hz |
|
|
Operating Voltage |
24V~64V (24/48VDC recommended) |
|
|
Static Current |
0.03A |
|
|
Peak Line Current |
3.5A |
|
|
Motor Peak Torque |
5N.m |
|
|
Motor Maximum Speed |
27rad/s (with 64V power supply) |
|
|
Recommended Operating Environment |
-20℃ ~ 60℃ |
|
|
Motor Reduction Ratio |
1:25 |
|
|
Motor Encoder Resolution |
15bit |
|
|
Motor Encoder Type |
Absolute encoder |
|
|
Motor Status Feedback |
Angle, Angular Velocity, Torque, Temperature |
|
|
Motor Control Instruction |
Angle, Angular Velocity, Torque, Stiffness, Damping |
[1] The gripper's width is 78mm when half-open. Its width is 120mm when fully open and 124.5mm when fully closed (with the side rails extended).
[2] The listed values for speed, gripping force, and full-stroke closing time are measured under varying conditions (24V-60V) by adjusting motor stiffness, damping, and torque. These values may vary depending on the application; please refer to your specific use case.
[3] Grasp Load (Form-fitting) refers to the maximum horizontal load the gripper can hold without losing its grip. This value may vary depending on the application; please refer to your specific use case.
[4] Grasp Load (Friction) refers to the maximum vertical load the gripper can hold without slipping, as measured with a square steel block. This value may vary depending on the application; please refer to your specific use case.
[5] All parameters listed above may vary in different application scenarios or with different model configurations. Please refer to your specific use case.
[6] The product appearance is subject to change. Please refer to the final product.
[7] This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
[8] Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.



